Nyan Bot
A very generic line follower, my first autonomous bot.
The line follower bot is an autonomous robot, which essentially means it operates on its own without human intervention.
Let me give you the very brief and generic idea of its working principle, it has three primary working units;
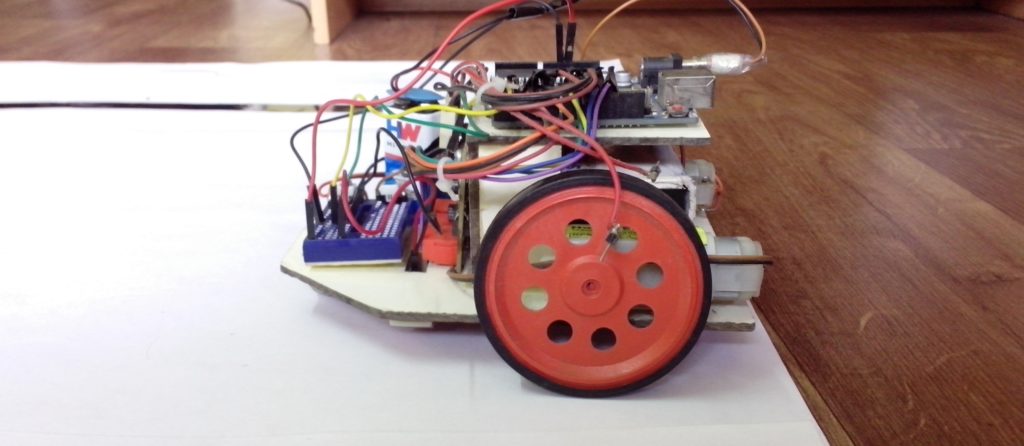
1. Line Sensor or Reflectance sensor (Pololu QTR-8RC reflectance sensor array).
2. Microcontroller (Arduino UNO).
3. Motors and Motor controller (6v, 300rpm DC motors, Dual DC Motor Driver).
The line sensor array senses the position of the line beneath the bot and tells the microcontroller where the line is, next the microcontroller computes(using PID controller) what speed the motors need to spin in order to follow the line. Then the calculated speeds for the motors is supplied to the Motor controller which in turn runs the motors in the specified speed. These steps are repeated to give the robot a smooth locomotion.
See how it runs!